Proyecto: Configuración inalámbrica a interruptor sincronizable por GPS
- Autor: Ignacio Marí
- Tutor: Eduardo Iriarte
- Presentación: 11 de junio de 2024
Resumen:
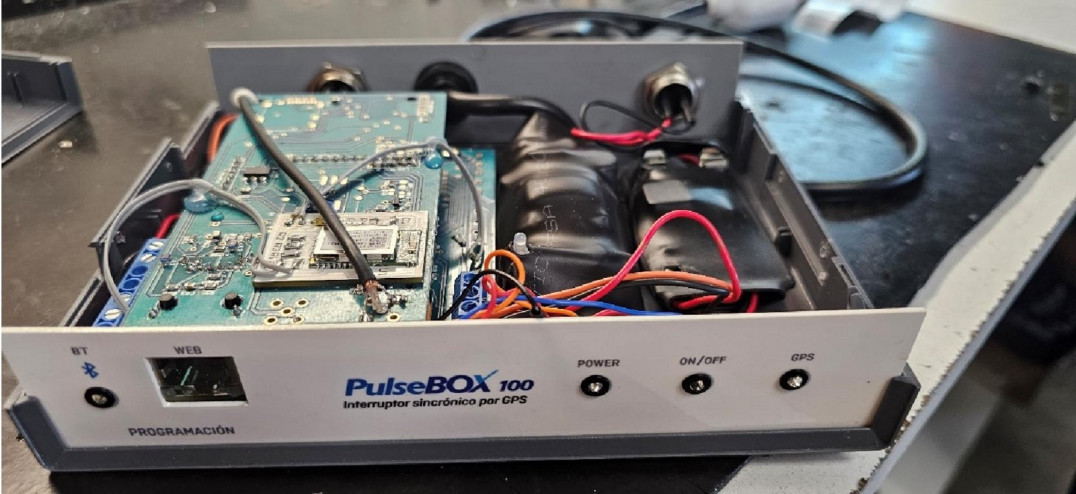
El proyecto, desarrollado en la empresa Omnitronics, consistió en la adaptación de un ciclador sincronizable por GPS, principalmente sobre en el diseño y desarrollo de su configuración inalámbrica mediante bluetooth. El equipo permite obtener ciclados sincronizados sobre todos los equipos que se instalan a lo largo de, por ejemplo, una cañería de varios kilómetros que tiene más de un sistema de protección catódica instalados a lo largo del mismo.
Se relevó el hardware y firmware existente, se realizaron los nuevos diseños hardware y firmware para aplicar la configuración inalámbrica de este ciclador mediante el agregado de comunicación bluetooth a la placa base. Se diseñó además la interfaz del operador bajo el entorno de Android Studio para dispositivos Android.
El equipo actualmente se encuentra en uso en diferentes estudios que se llevan a cabo en todo el país.