
El jueves 10 de diciembre, los estudiantes Gonzalo Romero Román y José Andrés Elustondo presentaron de forma virtual su Proyecto Final de Ingeniería en Mecatrónica: "Teleoperación de Robot Hexápodo". El trabajo fue dirigido por el Ing. Eric Sánchez.
Los robots móviles son cada vez más utilizados en entornos domésticos e industriales. Los hexápodos son robots móviles con 6 patas que permiten un movimiento omnidireccional y autónomo. Su flexibilidad ante distintos entornos hace que sean muy estudiados. Sin embargo, un mejor entendimiento del funcionamiento de estos robots puede producir una mejora de desempeño en diversas aplicaciones donde podrían ser útiles.
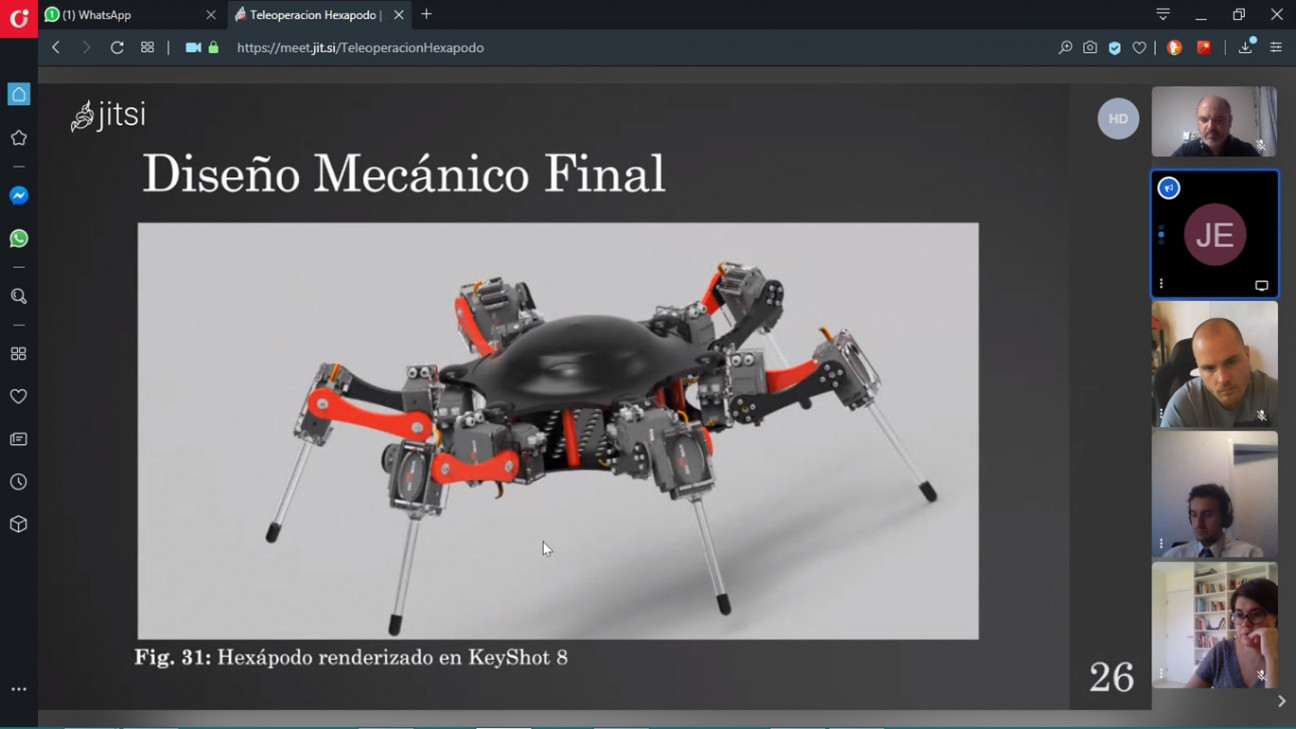
En este Proyecto Final de Estudios se implementa la teleoperación de un robot hexápodo de 18 articulaciones, detallando los modelos matemáticos involucrados, así como el hardware y el software utilizados en el desarrollo de la aplicación. Se especifican los componentes del robot, la arquitectura de control aplicada, el código utilizado, las comunicaciones, como también la fabricación y el ensamblado.
Se genera, además, un entorno de simulación para la evaluación de los algoritmos previo a su utilización en el robot real. Una vez construido el hexápodo se evalúa el correcto funcionamiento de los desarrollos realizados y, por último, se expresan los resultados obtenidos.
A continuación, compartimos la presentación realizada:

