
El proyecto final que presentará Adriel Fragapane trata de la investigación realizada acerca de la creación de un robot paralelo accionado por ocho cables, el desarrollo de un algoritmo eficiente para el control y sincronización de los motores, el diseño del sistema -tanto en la parte mecánica como en la electrónica- y la construcción y puesta en marcha de un prototipo completamente funcional.
La presentación tendrá lugar el miércoles 13 de febrero, a las 19.00, en el Aula del Instituto de Automática y Electrónica Industrial (IAEI), ubicado en el Edificio DETI I de la Facultad de Ingeniería de la UNCUYO. La entrada es libre y gratuita.
Sobre el robot paralelo accionado por cables
Frente al clásico brazo robot antropomórfico, los robots paralelos canalizan mejor la energía de los motores para aumentar la capacidad de carga de su efector y elevar la velocidad de movimiento del mismo.
Un robot paralelo consta principalmente de una base fija y una móvil, unidas mediante varias cadenas cinemáticas. Cada brazo está gobernado por un actuador y, en la mayoría de los casos, se busca que estos estén fijos a la base para mejorar la dinámica del robot.
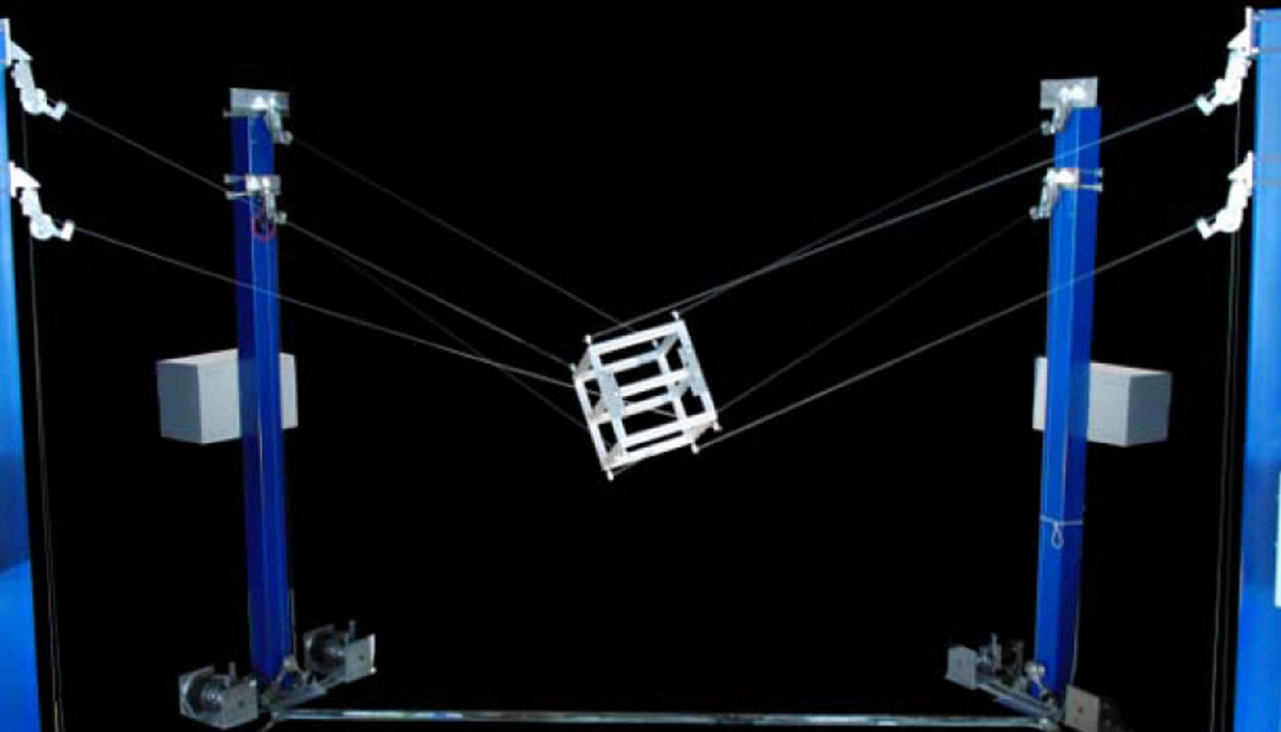
Actualmente se presenta una alternativa a los robots paralelos rígidos convencionales, la cual consiste en un base móvil sostenida mediante cables, que se desplaza gracias a la tensión que se genera en ellas debido a la fuerza que le imparten los motores.
El uso de este tipo de robot aún no ha sido extendido pero posee un gran potencial debido a sus características propias; como, por ejemplo, que cuenta con un amplio espacio de trabajo, bajo costo en comparación con otros sistemas de similares prestaciones y un montaje relativamente simple.

