LÍNEAS DE INVESTIGACIÓN
- Robótica aplicada incluyendo, pero no limitándose. a las siguientes áreas: Robótica Cooperativa, Robótica de Servicio, Tele-operación, Dextereous Manipulations.
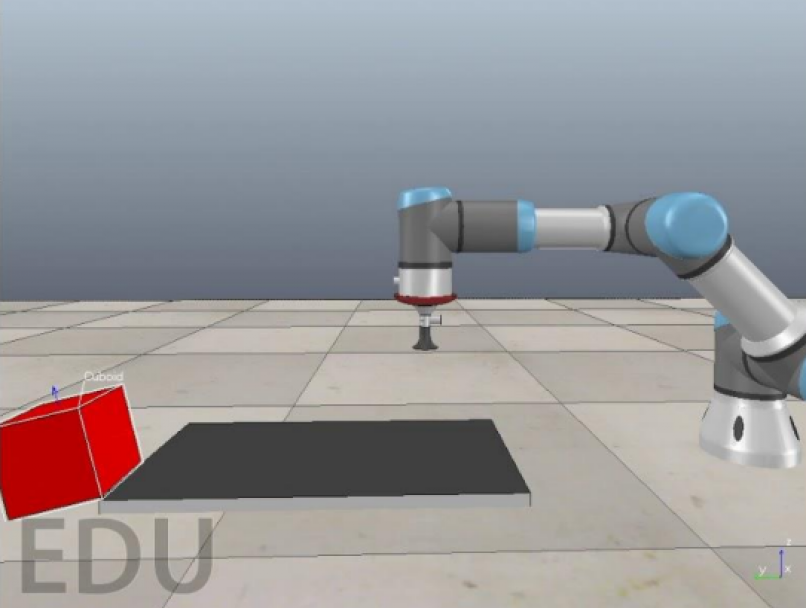
- Software, desarrollo sistemas de simulación, control y planificación de tareas.
- Diseño y fabricación prototipos a escala, desarrollo software y hardware.
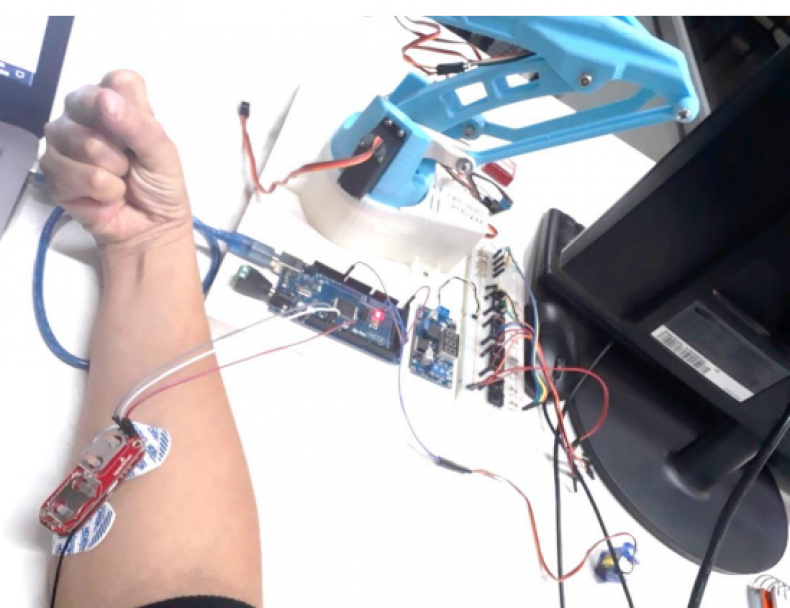
- Sensores, automatización prótesis y ortesis.