El lunes 27 de mayo, los estudiantes Gabriel Cabrero García y Agustín Sardi Bottino defendieron su Proyecto Final de Estudios de Ingeniería Mecatrónica, titulado "Manipulación a distancia con Robot Antropomórfico". El trabajo fue tutorado por el Ing. Eric Sánchez.
El proyecto aborda el desarrollo de un sistema de control remoto para un brazo antropomórfico, con el propósito de mejorar la interacción humano-robot en entornos industriales.
El sistema utiliza herramientas de Visión Artificial (OpenCV/HandDetector) para la captura de gestos en tiempo real, esto es localizar en las coordenadas en 3D de todas las articulaciones de la mano y muñeca, y a partir de allí determinar los gestos realizados. Destaca que esta determinación se realiza mediante una cámara digital estándar tipo webcam. Estos gestos se replican en el prototipo físico de manipulador robótico antropomórfico mediante un mecanismo de servomotores y tensores coordinados por un microcontrolador ARM.
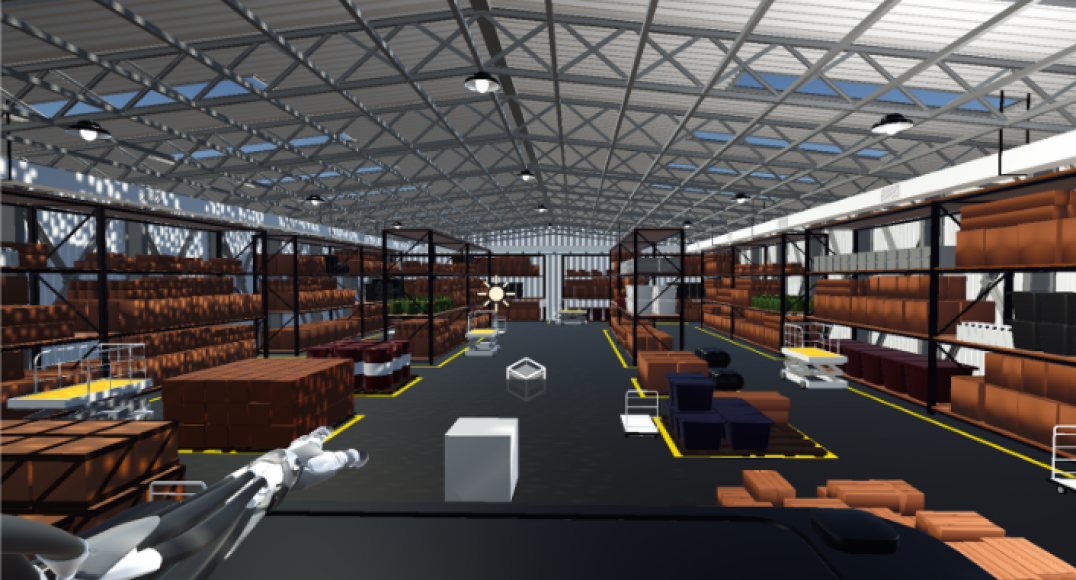
Por otra parte, con el propósito de realizar el entrenamiento de operadores sin necesidad de utilizar el prototipo físico del manipulador o el entorno real, se desarrolló un prototipo 3D en un entorno de Realidad Virtual, simulando el ambiente de trabajo y el brazo manipulador, y que se comunica con el software de captura de gestos. Para mejorar la experiencia inmersiva y la continuidad, el menú de entrenamiento se maneja directamente en el ambiente utilizando gestos especiales de la mano.
El trabajo integra así un amplio abanico de tecnologías concurrentes de la Mecatrónica, incluyendo la fabricación y montaje del mecanismo y presenta un gran campo de aplicación.