El martes 23 de abril, el estudiante Maximiliano García Girón presentó su proyecto final de Ingeniería Mecatrónica, titulado “Exploración aumentada mediante robot holonómico diferencial con visión robótica para búsqueda y rescate”, dirigido por la Dra. Ing. Selva Rivera
El objetivo fue construir un robot teleoperado con capacidad de detectar y clasificar elementos claves del entorno mediante visión artificial, y con conocimiento de su ubicación mediante un sistema de navegación odométrico-inercial, información que el operario puede disponer a través de una interfaz en computadora para explorar en forma remota entornos peligrosos.
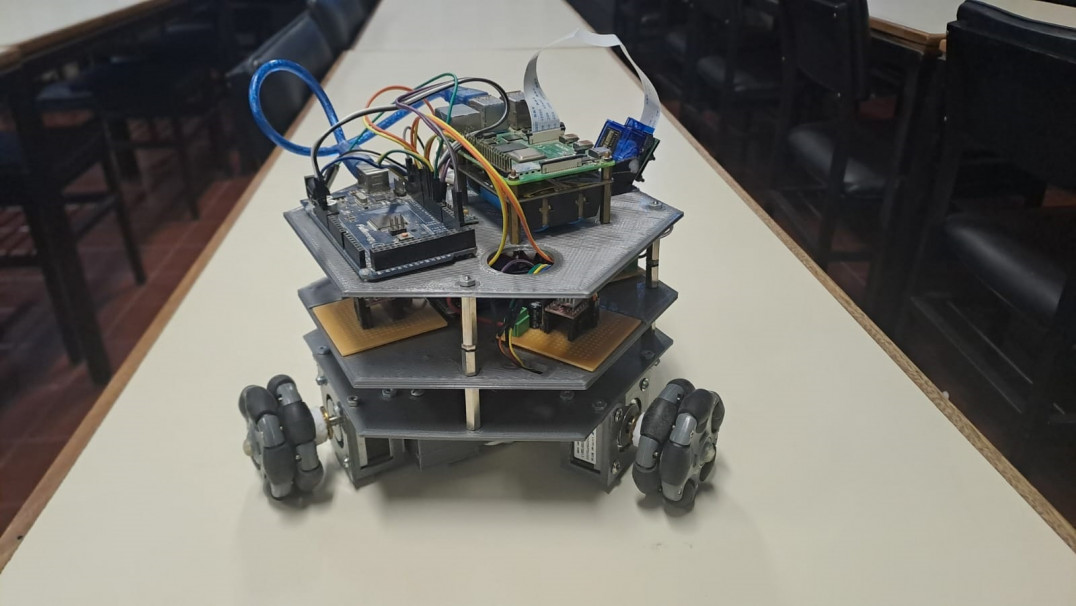
El proyecto tuvo un abordaje multidisciplinario, que incluyó: el diseño, construcción y modelización de todos los elementos de la plataforma holonómica diferencial; la programación del control electrónico de los motores; el desarrollo e implementación del sistema de visión robótica, incluyendo todas las etapas de diseño y aprendizaje de IA; el sistema de navegación odométrica-inercial con filtrado de Kalman; la interfaz de usuario y la comunicación entre todos los subsistemas que corren en un microcontrolador, una SBC y una computadora.
Con este trabajo, Maximiliano ha demostrado el dominio de un amplio conjunto de temas, que ha logrado integrar en un prototipo funcional, de gran valor académico y que sirve de base para futuros desarrollos.