El proyecto es realizado por el equipo dirigido por la Dra. Ing. Carolina Díaz, codirigido por el Mgter. Ing. Eduardo Iriarte e integrado por los ingenieros Eric Sánchez y Fernando Cladera. Consiste en el desarollo e implementación de una celda prototipo a escala para construir un laboratorio de robótica en la Facultad de Ingeniería, con el objeto de utilizarlo para fines didácticos. Dicha celda estará conformada por diversos brazos robóticos, fabricados utilizando la impresora 3D con que cuenta la institución.
Al momento, ya se ha creado el primer brazo robótico y la propuesta es ensamblar varios de ellos, estos en su conjunto conformarán una celda de tipo industrial, con un diseño modular que impulse un permanente crecimiento de la misma. Además, el sistema desarrollado será flexible, escalable y reconfigurable, lo que le permitirá al alumno cambiar su diseño, pudiendo trabajar con las partes y, también, con el todo. .
En el caso de la Facultad de Ingeniería, el uso de la celda está planteado incialmente para el uso integrador de las cátedras de cuarto año de Ingeniería en Mecatrónica. La idea es tener dos o tres manipuladores construidos a fin de año, cuya fabricación permitirá fijar conocimientos: planificación de trayectorias, disposición de la celda, diseño y mecanizado de piezas, construcción y programación de manipuladores.
Además, se propone como opción para proyecto de fin de cátedra en las asignaturas de Robótica I o Microcontroladores y Electrónica de Potencia; incluso es un espacio que está abierto para que los alumnos realicen sus construcciones de prototipos para tesis en el laboratorio de robótica.
Más detalles del proyecto
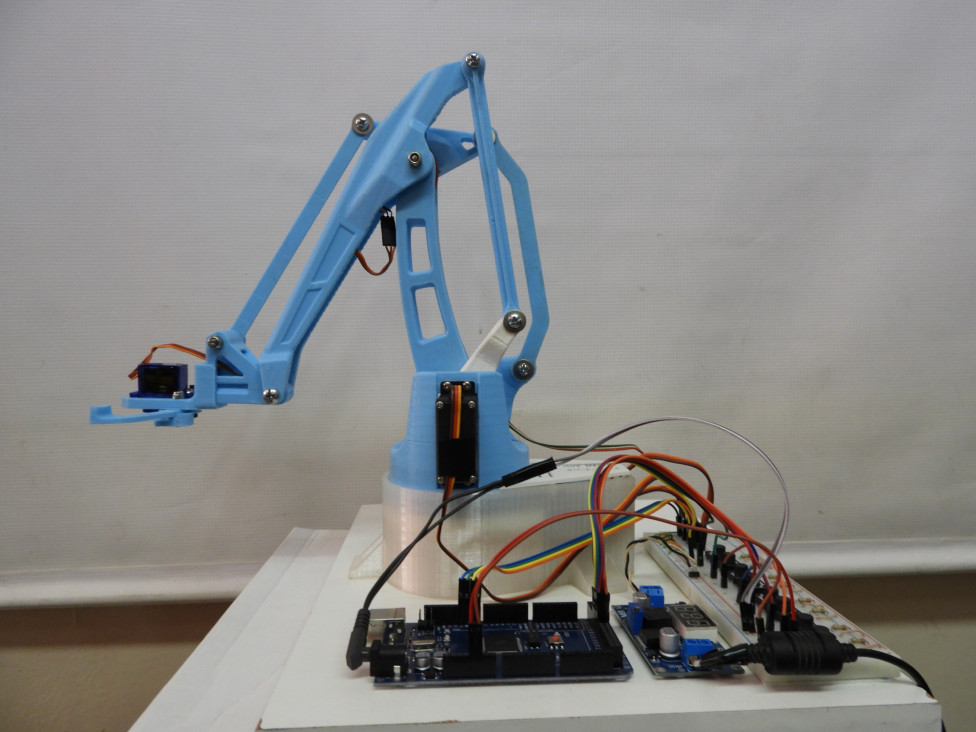
La estructura inicial del hardware de la celda contará con robots manipuladores de tres o más grados de libertad y otros dispositivos complementarios; como mecanismos de transporte, sensores y actuadores, que permitan al alumno ejecutar tareas típicas de entornos industriales.
A su vez, el control y la comunicación de la celda se llevará a cabo usando sistemas embebidos con los que se trabaja en otras asignaturas de la carrera, tales como Atmel AVR en plataforma Arduino o similares.
En particular, esta propuesta se enmarca dentro del Programa de Fortalecimiento de la Enseñanza de la Facultad de Ingeniería (PROFEN), como “Proyecto de Tipo II”, formulado para actualizar el equipamiento y el instrumental destinado a prácticas de laboratorio y demostraciones didácticas.
El PROFEN 2017 tiene como objetivo profundizar las acciones tendientes al progreso continuo de las carreras de grado de la Facultad. En congruencia, se propone que los proyectos surjan de los propios espacios curriculares; con el objetivo de implementar líneas de acción que permitan el desarrollo y fortalecimiento de los procesos de enseñanza-aprendizaje. En este sentido, ofrece un financiamiento para sostener las iniciativas del cuerpo docente, aquellas que mejor se ajusten a los requerimientos del programa.