
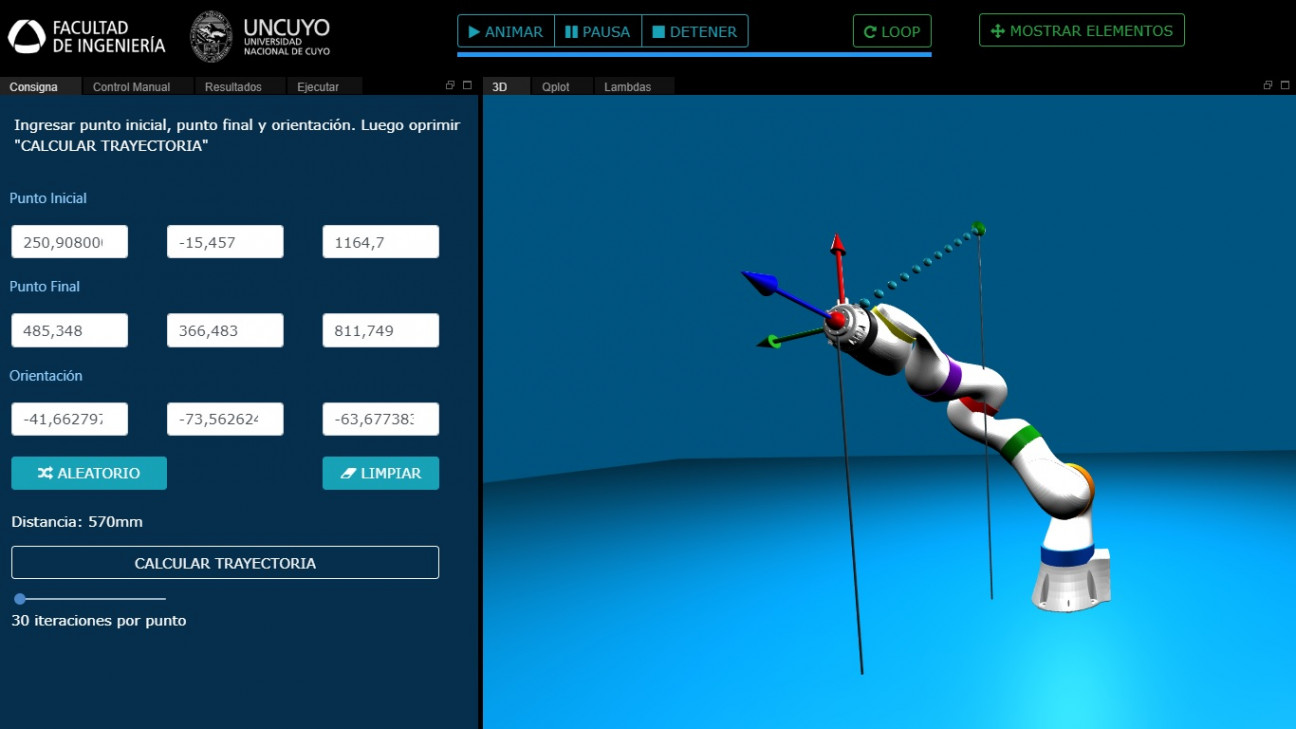
En este proyecto se desarrolló un algoritmo que calcula trayectorias articulares para un robot redundante de 7 grados de libertad a partir de una consigna en el espacio cartesiano. El programa realiza una optimización punto a punto mediante un algoritmo de inteligencia artificial llamado "recocido simulado". Además, se diseñó una interfaz de usuario para el ingreso de consignas, cálculo y simulación de trayectorias sobre un modelo 3D y un controlador para la ejecución de las trayectorias en un prototipo accionado por servomotores.
Los brazos robóticos redundantes son capaces de realizar tareas con una mayor flexibilidad que el resto de los robots serie. Este tipo de robots permite ejecutar trayectorias condicionadas por la presencia de objetos en el espacio de trabajo con una mejor manipulabilidad y optimizar el consumo energético. La desventaja de estos robots está en la complejidad de su cinemática y del cálculo de sus trayectorias.
La presentación del Proyecto Final tendrá lugar el miércoles 13 de junio, a las 10.00, en el Aula de Conectividad, ubicada en planta baja del Edificio de Aulas de la Facultad de Ingeniería de la UNCUYO. Se invita a participar de la misma a todos los miembros de la comunidad académica y público en general.

